DENSO - RC8A IT-ROB-DEN-2018-00001

- GINDUMAC
- Prodotti
- Attrezzature di automazione
- ➤ DENSO RC8A - 2018 - Robot in vendita | gindumac.com
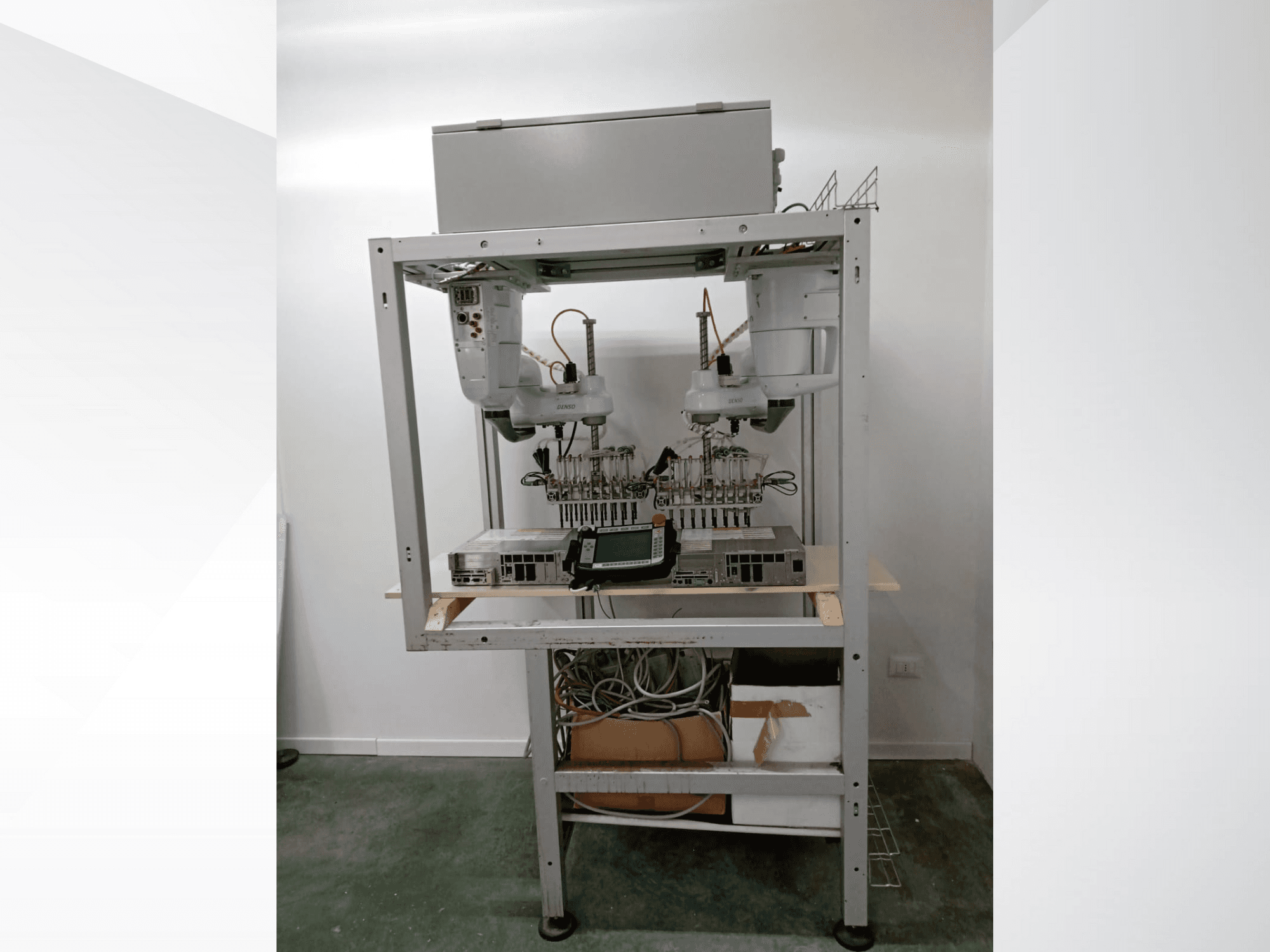
Questo DENSO RC8A è stato prodotto nel 2018. È dotato di una cella robotica con due robot SCARA, ciascuno capace di uno sbraccio massimo di 550 mm e di una corsa dell'asse Z di 320 mm. Il sistema comprende un controller RC8A, un software di programmazione offline e funzioni di autodiagnosi. Ideale per applicazioni che richiedono una manipolazione robotica ad alta velocità. Contattateci per ulteriori informazioni su questa macchina.
Panoramica
- marca: DENSO
- anno: 2018
- MODELLO: RC8A
- tipo di applicazione: Robotica
- Località: Italia
- tipo di macchina: Braccio robotico
Informazioni aggiuntive
Movimento e controllo:
Sistema di controllo punto-punto
Movimento lineare e circolare in 3 dimensioni
Capacità di memoria:
Memoria variabili: 1,75 MB (circa 65000 punti)
Memoria programmi: 400 MB
Fino a 256 programmi
5000 istruzioni per programma
Segnali di I/O:
Ingressi:
8 ingressi utente al polso del robot (Hand I/O)
8 ingressi utente sul controller (Mini I/O)
8 ingressi di sistema
Uscite:
8 uscite utente sul polso del robot (I/O mano)
7 uscite utente sul controllore (Mini I/O)
8 uscite di sistema
Interfacce di comunicazione:
1 × RS-232C
Gigabit Ethernet
2 × USB
Caratteristiche aggiuntive:
Funzioni di autodiagnosi
Condizioni operative:
Temperatura: 0-40 °C
Umidità: ≤ 90% RH
Dimensioni e peso del controllore:
RC8A standard: 357 × 320 × 94 mm
RC8A con movimento di sicurezza: 411 × 320 × 94 mm
Volume: 12,4 litri
Peso: 12 kg
Cavi:
Cavo di alimentazione: 5 m
Cavo di I/O: 8 m (opzionale)
Ciondolo didattico:
Quantità: 1 unità (per entrambi i robot)
Lunghezza del cavo: 4 m (opzionale 8 m / 12 m)
Display:
7,5" TFT LCD touchscreen
Risoluzione: 640 × 480 pixel
Alimentazione: 24 V
Classe di protezione: IP65 (resistente alla polvere e agli spruzzi)
Dimensioni: 290 × 198 × 80 mm
Peso: circa 1 kg
Funzioni:
Creazione e modifica del programma
Configurazione dei parametri
Controllo del movimento e del jogging del robot
Avvio del programma
Modalità di insegnamento e verifica
Gestione degli I/O
Impostazione della comunicazione
Visualizzazione degli errori
Robot
Quantità: 2 unità
Tipo: SCARA
Caratteristiche meccaniche:
Sbraccio massimo: 550 mm
Corsa asse Z: 320 mm
Ripetibilità (J1 + J2): ±0,012 mm
Ripetibilità (asse Z): ±0,01 mm
Ripetibilità (asse T): ±0.004°
Capacità di carico (polso): 8 kg
Velocità
Velocità massima del composito: 8780 mm/sec
Velocità dell'asse Z: 2760 mm/sec
Velocità asse T: 220°/sec
Connessioni del braccio robotico
Connessioni pneumatiche:
4 tubi dell'aria, Ø 6 mm
Segnali elettrici:
24 segnali tramite connettore
Caratteristiche del robot
Software di programmazione offline
Encoder assoluti
Servomotori AC sigillati, senza spazzole e senza manutenzione
Alimentazione: Monofase o trifase 230 V
Dotazione aggiuntiva
2 dispositivi di presa con sensori per il rilevamento della quantità prelevata
1 quadro elettrico di controllo che interfaccia l'intero sistema
Storia della macchina
Descrizione funzionale: La cella robotica è stata originariamente progettata per alimentare una macchina per l'imballaggio di posate. Il sistema prelevava forchette impilate da casse dedicate e le trasferiva su un trasportatore di confezionamento a una velocità di carico di 100 pezzi al minuto. Mentre i due robot SCARA funzionavano correttamente, il sistema di scambio delle casse (casse vuote e casse piene) non era stato progettato in modo ottimale. Per questo motivo, alla fine la cella robotica è stata dismessa. È disponibile un breve video del robot in funzione.
*Ci possono essere differenze tra i dati indicati e i valori reali, questo dovrebbe essere confermato dal rappresentante di vendita.
Borja Garcia
Termini di pagamento
Pagamento anticipato
Finanziamento delle attività